刚柔串联耦合系统的动力学建模方法
柔性支撑并联机构的结构较为复杂,刚性并联机构和柔性并联机构相互串联耦合的结构导致传统的动力学建模方法无法适用, 耦合特性的研究制约着柔性支撑并联机构动力学模型的求解。实验室针对柔性支撑并联机构的系统耦合特性开展研究,提出了一种刚柔串联耦合系统的动力学建模方法。针对整体动力学模型方程结构复杂冗长、难以化简的情况,建立柔性支撑并联机构各组成部分的分离模型,即柔性支撑弹性动力学模型和基础平台运动的刚性并联机构动力学模型,并建立外界扰动模型。将柔性支撑的弹性动力学模型、刚性并联机构的刚体动力学模型和外界扰动模型联立并有机结合,获得柔性支撑并联机构整体动力学模型。刚柔串联耦合系统的动力学建模方法充分揭示了柔性支撑和刚性并联机构之间运动和力的相互作用。刚柔耦合系统动力学建模理论可用于指导各种刚柔耦合系统的动力学建模研究,已在国家天文台密云观测站FAST 1:15完整运动学缩尺模型的数值仿真研究中得到充分验证和应用。
代表性论文:
-
Z Shao, X Tang*, L Wang, X Chen. Dynamic modeling and wind vibration control of the feed support system in FAST. Nonlinear Dynamics, 2012, 67(2):965-985. (SCI, EI)
-
Z Shao, X Tang*, X Chen, L Wang. Driving force analysis for the secondary adjustable system in FAST. Robotica, 2011, 29(06): 903-915. (SCI, EI)
供稿:段金昊
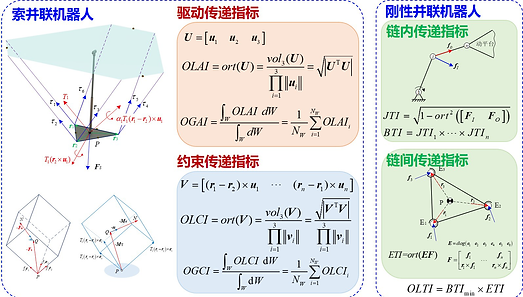
基于正交度的运动学性能评价指标
性能指标是机构优化设计的准则,如何揭示并联机器人运动学和动力学本质特性,建立性能评价和优化设计方法,保证机构优异的综合性能,是机构学研究的一个关键难题。机构本质是将力从驱动端传递到终端,因此力传递是性能的核心。
基于欧氏空间的矩阵正交度原理,揭示了索并联机器人驱动力和约束力的传递及共同作用机理、刚性并联机构支链内力传递和支链间力合成特性,构建了局部及全局力传递性能评价数学模型,并定义了相应的指标,建立了兼顾索驱动和刚性并联机构的运动学性能评价指标,突破了并联机器人性能定量描述和优化的难题。定义的性能指标与坐标系无关,指标值介于0和1之间,物理意义明确,反映了并联机器人驱动力传递效率、终端约束性能及抵抗外力的能力,可作为机器人性能分析和优化设计的评价标准,用于识别机器人的奇异位形及距离远近,为索驱动和刚性并联机器人提供了一种高效的尺度优化和构型优选方法。
代表性论文:
-
Z Shao*, J Mo, X Tang, L Wang. Transmission Index Research of Parallel Manipulators Based on Matrix Orthogonal Degree. Chinese Journal of Mechanical Engineering, 2017, 30(6):1396-1405.
-
Z Zhang, L Wang, Z Shao*. Improving the kinematic performance of a planar 3-RRR parallel manipulator through actuation mode conversion. Mechanism and Machine Theory, 2018, 130:86-108. (SCI, EI)
-
L Wang, Z Zhang, Z Shao*, X Tang. Analysis and optimization of a novel planar 5R parallel mechanism with variable actuation modes. Robotics and Computer-Integrated Manufacturing. 2019, 56, 178-190. (SCI, EI)
-
Z Zhang, Z Shao*, L Wang. Optimization and implementation of a high-speed 3-DOFs translational cable-driven parallel robot. Mechanism and Machine Theory, 2020, 145, 103693. (SCI, EI)
供稿:张兆坤
基于等效惯量的动力学性能评价指标
惯量直接决定机器人的动态特性,是其驱动选型的重要依据。惯量匹配是指机器人折算到驱动端的负载惯量与驱动本身的惯量达到某种最优,既充分发挥驱动效能,又获得高动态特性。并联机器人的惯量以矩阵形式出现,缺少明确的度量指标,并联机器人的动力学优化和驱动匹配面临巨大挑战。
课题组通过构建量纲统一的并联机构关节空间惯量矩阵,揭示了并联机构关节空间加速度矩阵数值分布与支链运动耦合的内在联系,提出关节映射等效惯量(JRI)和惯量变异系数(CVI)等局部及全局动力学性能评价指标,明确了并联机器人加速能力的本质因素;所提出的指标具有意义明确、简洁准确地描述并联机构的惯量属性、有效反应并联机构的加速特性等特点。综合考虑机构的加速能力、动态响应特性和机械振动频率,建立了并联机构的惯量匹配准则,为并联机器人驱动系统的匹配和动态特性的提升奠定了基础。
代表性论文:
-
J Mo, Z Shao*, L Guan, F Xie, X Tang. Dynamic performance analysis of the X4 high-speed pick-and-place parallel robot. Robotics and Computer-Integrated Manufacturing, 2017, 46:48-57. (SCI, EI)
-
Z Shao, X Tang*, X Chen, L Wang. Research on the inertia matching of the Stewart parallel manipulator. Robotics and Computer-Integrated Manufacturing, 2012, 28(6):649-659. (SCI, EI)
-
Z Shao, X Tang*, X Chen, L Wang. Inertia Match of a 3-RRR Reconfigurable Planar Parallel Manipulator. Chinese Journal of Mechanical Engineering, 2009, 22(6):791-799. (SCI, EI)
供稿:张兆坤
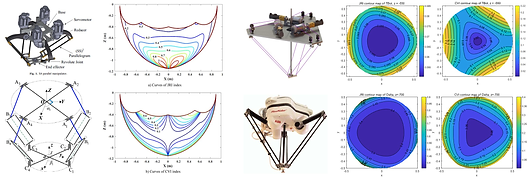
综合优化设计方法
基于所建立的运动学和动力学性能指标及惯量匹配准则,建立了综合优化设计方法,实现了“尺度-结构-驱动”一体化综合优化设计,如图1所示。在尺度层面,采用所提出的基于矩阵正交度的力传递性能评价指标,结合性能图谱和非线性优化方法,完成尺度的优选;在结构层面,利用并联机构的模块化优势,基于三维虚拟样机,采用关节映射惯量和惯量变异系数等动力学指标,建立指标随尺度和结构在小范围内变化的数学模型,确定尺寸和机械结构;在驱动层面,基于惯量匹配准则,兼顾功耗、扭矩和速度要求,完成伺服电机和传动链的优化匹配。该方法符合机器人的设计过程,逐步细化,实用性强,实现了运动学和动力学的综合性能优化,并通过驱动匹配,保证机器人的优异性能。
代表性论文:
-
Z Zhang, Z Shao*, L Wang. Optimization and implementation of a high-speed 3-DOFs translational cable-driven parallel robot. Mechanism and Machine Theory, 2020, 145, 103693. (SCI, EI)
-
Z Zhang, Z Shao *, F Peng, H Li, L Wang. Workspace Analysis and Optimal Design of a Translational Cable-Driven Parallel Robot with Passive Springs. Journal of Mechanisms and Robotics, 2020, 12(5): 051005. (SCI, EI)
-
L Wang, Z Zhang, Z Shao*. Kinematic performance analysis and promotion of a spatial 3-RPaS parallel manipulator with multiple actuation modes, Journal of Mechanical Science and Technology. 2019, 33 (2), 889-902. (SCI, EI)
-
Z Shao, X Tang*, L Wang, D Sun. Atlas Based Kinematic Optimum Design of the Stewart Parallel Manipulator. Chinese Journal of Mechanical Engineering, 2015, 28(1):20-28. (SCI, EI)
供稿:张兆坤
抑振控制理论
相较于基座固定的并联机构,由于柔性支撑机器人系统内部存在刚柔耦合及力位耦合问题,在外力或刚性机器人反作用力的影响下容易产生振动,造成系统终端精度丧失的情况。如何实现抑振控制,保证系统终端精度,是柔性支撑机器人研究的重点和难点。柔性支撑本身刚度较低、控制带宽有限,能够实施的抑振效果受到制约。实验室利用刚性机器人,采用轨迹补偿抑振和内力抑振策略,较好地实现了柔性支撑机器人的抑振控制。
轨迹补偿抑振采用刚性机器人实时补偿柔性支撑振动产生的终端位姿误差,从而保证系统终端精度。开展柔性支撑系统轨迹规划,使刚性并联机构在理想状态下无需运动,为轨迹补偿抑振控制奠定基础。利用非接触式位置传感器实时测量柔性基础的姿态误差,解算出全局坐标系下系统终端误差,然后将误差转换到刚性机器人的关节坐标系进行补偿。基于模糊控制理论,设计相应的模糊控制器实现轨迹补偿抑振控制,在实现刚性机器人终端精度满足要求的同时减小了刚性机器人对柔性支撑平台的反作用力冲击,有效保证了柔性支撑机器人系统的整体稳定性。
内力抑振控制利用刚性机器人运动对柔性支撑产生的反作用力来抵消柔性支撑的振动,从而保证系统整体的稳定和终端精度。建立柔性支撑并联机构的弹性动力学模型,建立机构外部扰动模型,从而联立获得柔性支撑并联机构的整体动力学模型。利用刚性机器人上安装的加速度传感器获得其加速度和角加速度信息,根据整体动力学模型解算出所需的反作用力,并控制刚性机器人执行相应动作进行补偿,从而避免产生较大的跟随误差。
所提出的轨迹补偿抑振控制和内力抑振控制理论可用于各种柔性支撑机器人的抑振控制研究。理论已在国家天文台密云观测站搭建的FAST 1:15完整运动学缩尺模型的天文观测获得中得到验证和应用,使其终端精度能够良好满足天文观测要求。
代表性论文:
-
Z Shao, X Tang*, L Wang, X Chen. Dynamic modeling and wind vibration control of the feed support system in FAST. Nonlinear Dynamics, 2012, 67(2):965-985. (SCI, EI)
-
Z Shao, X Tang*, L Wang, Z You. A Fuzzy PID Approach for the Vibration Control of the FSPM. International Journal of Advanced Robotic Systems, 2013, 10:59. (SCI, EI)
-
Z Shao, X Tang*, L Wang. Optimum Design of 3-3 Stewart Platform Considering Inertia Property. Advances in Mechanical Engineering, 2013(5):1-10. (SCI)
-
刘志远, 陈炼, 邵珠峰*, 王立平, 唐晓强. FAST馈源支撑系统的终端精度保证研究. 机械工程学报, 2017, 53 (17): 50-59. (EI)
供稿:段金昊
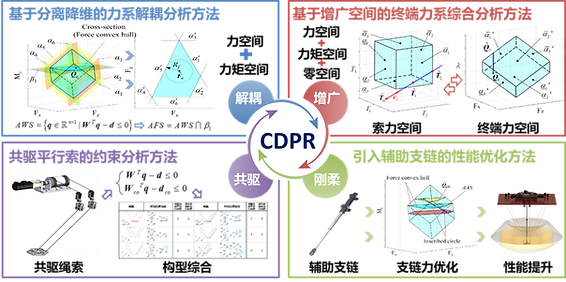
索并联机器人终端驱动及约束性能分析理论
索并联机器人构型及运动分析的基础是索力(Tension)与终端力旋量(Wrench)的映射关系。针对这一关系,课题组提出了AWS(Available Wrench Set)分离降维方法,实现力维度和力矩维度解耦分析,解决了现有方法维度耦合及直观性差的问题。同时,提出了AWS增广空间,突破了现有AWS凸包降维和信息丢失的瓶颈,有效提高了AWS分析的准确性和通用性。将索并联机器人的运动要求划分到自由度和矢量力系空间,通过自由度与约束对偶转换,设计刚性支链;基于矢量封闭原理,确定绳索布局,建立了“刚柔并联”索机器人构型综合新方法,实现高效驱动与有效约束的结合,简化本体结构,丰富构型。
代表性论文:
-
Jinhao Duan, Hanqing Liu, Zhufeng Shao*, et al. Anti-disturbance performance analysis and tension distribution method for redundant cable-driven parallel robots, Mechanism and Machine Theory, 2025, 205: 105861
-
Jinhao Duan, Hanqing Liu, Zhufeng Shao*, et al. Anti-disturbance performance analysis and the innovative design of the FAST fine-tuning platform. Mechanism and Machine Theory, 2024, 197: 105645
-
Jinhao Duan, Hanqing Liu, Zhufeng Shao*, et al. Reconfiguration and Performance Evaluation of TBot Cable-Driven Parallel Robot. Journal of Mechanisms and Robotics, 2025, 17(1)
供稿:段金昊



轨迹补偿抑振控制流程及控制效果
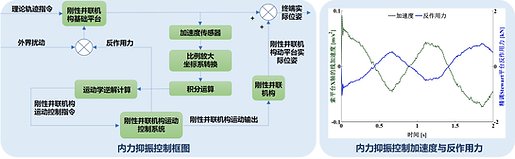
内力抑振控制流程及控制效果